
15.4: Coastal Models
- Page ID
- 30162

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The great economic importance of the coastal zone has led to the development of many different numerical models for describing coastal currents, tides, and storm surges. The models extend from the beach to the continental slope, and they can include a free surface, realistic coasts and bottom features, river runoff, and atmospheric forcing. Because the models don’t extend very far into deep water, they need additional information about deep-water currents or conditions at the shelf break.
The many different coastal models have many different goals, and many different implementations. Several of the models described in the previous section, including MOM and ROM, have been used to model coastal processes, but many other specialized models have also been developed. Heaps (1987), Lynch et al (1996), and Haidvogel and Beckman (1998) provide good overviews of the subject. Rather than look at a menu of models, let’s look at two typical models.
The Princeton Ocean Model, developed by Blumberg and Mellor (1987, and Mellor, 1998), is widely used for describing coastal currents. It includes thermodynamic processes, turbulent mixing, and the Boussinesq and hydrostatic approximations. The Coriolis parameter is allowed to vary using a beta-plane approximation. Because the model must include a wide range of depths, Blumberg and Mellor used a vertical coordinate \(\sigma\) scaled by the depth of the water: \[\sigma = \frac{z - \eta}{H + \eta} \nonumber \]
where \(z = \eta (x, y, t)\) is the sea surface, and \(z = -H(x, y)\) is the bottom.
Sub-grid turbulence is parameterized using a closure scheme proposed by Mellor and Yamada (1982) whereby eddy diffusion coefficients vary with the size of the eddies producing the mixing and the shear of the flow.
The model is driven by wind stress and heat and water fluxes from meteorological models. The model uses known geostrophic, tidal, and Ekman currents at the outer boundary.
The model has been used to calculate the three-dimensional distribution of velocity, salinity, sea level, temperature, and turbulence for up to 30 days over a region roughly 100–1000 km on a side with grid spacing of 1–50 km.
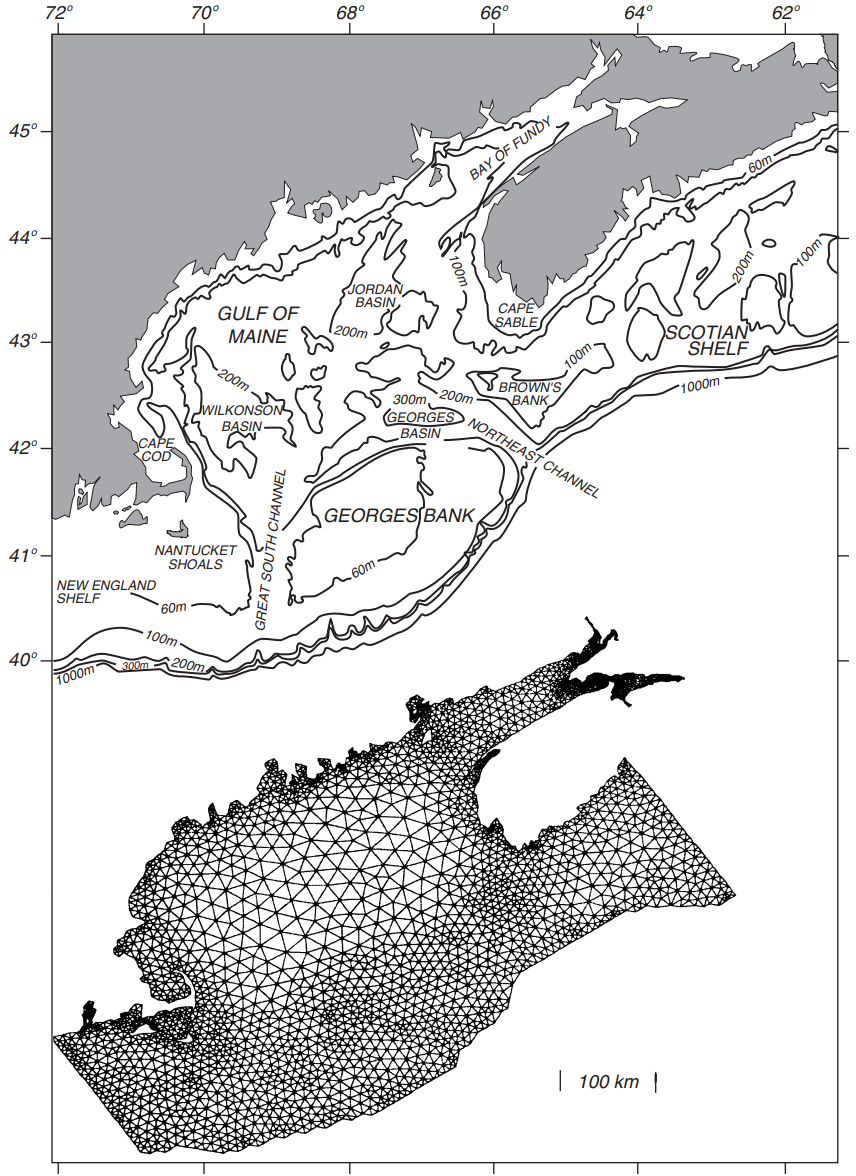
The Dartmouth Gulf of Maine Model, developed by Lynch et al (1996), is a 3-dimensional model of the circulation using a triangular, finite-element grid. The size of the triangles is proportional to both depth and the rate of change of depth. The triangles are small in regions where the bottom slopes are large and the depth is shallow, and they are large in deep water. The variable mesh is especially useful in coastal regions where the depth of water varies greatly. Thus the variable grid gives highest resolution where it is most needed.
The model uses roughly 13,000 triangles to cover the Gulf of Maine and nearby waters of the north Atlantic (figures \(\PageIndex{1}\)). Minimum size of the elements is roughly one kilometer. The model has 10 to 40 horizontal layers. The vertical spacing of the layers is not uniform. Layers are closer together near the top and bottom and they are more widely spaced in the interior. Minimum spacing is roughly one meter in the bottom boundary layer.
The model integrates the three-dimensional, primitive equations in shallow-water form. The model has a simplified equation of state and a depth-averaged continuity equation, and it uses the hydrostatic and Boussinesq assumptions. Sub-grid mixing of momentum, heat and mass is parameterized using the Mellor and Yamada (1982) turbulence-closure scheme which gives vertical mixing coefficients that vary with stratification and velocity shear. Horizontal mixing coefficients were calculated from Smagorinski (1963). A carefully chosen, turbulent, eddy viscosity is used in the bottom boundary layer. The model is forced by wind, heating, and tidal forcing from the deep ocean.
The model is spun up from rest for a few days using a specified density field at all grid points, usually from a combination of CTD data plus historical data. This gives a velocity field consistent with the density field. The model is then forced with local winds and heat fluxes to calculate the evolution of the density and velocity fields.
Comments on Coastal Models
Roed et al. (1995) examined the accuracy of coastal models by comparing the ability of five models, including Blumberg and Mellor’s, to describe the flow in typical cases. They found that the models produced very different results, but that after the models were adjusted, the differences were reduced. The differences were due to differences in vertical and horizontal mixing and spatial and temporal resolution. Hackett et al. (1995) compared the ability of two of the five models to describe observed flow on the Norwegian shelf. They conclude that
…both models are able to qualitatively generate many of the observed features of the flow, but neither is able to quantitatively reproduce detailed currents …[Differences] are primarily attributable to inadequate parameterizations of subgrid scale turbulent mixing, to lack of horizontal resolution and to imperfect initial and boundary conditions.
Storm-Surge Models
Storms coming ashore across wide, shallow, continental shelves drive large changes of sea level at the coast called storm surges (see Section 17.3 for a description of surges and processes influencing surges). The surges can cause great damage to coasts and coastal structures. Intense storms in the Bay of Bengal have killed hundreds of thousands in a few days in Bangladesh. Because surges are so important, government agencies in many countries have developed models to predict the changes of sea level and the extent of coastal flooding.
Calculating storm surges is not easy. Here are some reasons, in a rough order of importance.
- The distribution of wind over the ocean is not well known. Numerical weather models calculate wind speed at a constant pressure surface; storm-surge models need wind at a constant height of 10 m. Winds in bays and lagoons tend to be weaker than winds just offshore because nearby land distorts the airflow, and this is not included in the weather models.
- The shoreward extent of the model’s domain changes with time. For example, if sea level rises, water will flood inland, and the boundary between water and sea moves inland with the water.
- The drag coefficient of wind on water is not well known for hurricane-force winds.
- The drag coefficient of water on the seafloor is also not well known.
- The models must include waves and tides which influence sea level in shallow waters.
- Storm surge models must include the currents generated in a stratified, shallow sea by wind.
To reduce errors, models are tuned to give results that match conditions seen in past storms. Unfortunately, those past conditions are not well known. Changes in sea level and wind speed are rarely recorded accurately in storms except at a few, widely paced locations. Yet storm-surge heights can change by more than a meter over distances of tens of kilometers. Despite these problems, models give very useful results. Let’s look at the official NOAA model, and a new experimental model developed by the Corps of Engineers.
The Sea, Lake, and Overland Surges Model (SLOSH) is used by NOAA for forecasting storm surges produced by hurricanes coming ashore along the Atlantic and Gulf coasts of the United States (Jelesnianski, Chen, and Shaffer, 1992).
The model is the result of a lifetime of work by Chester Jelesnianski. In developing the model, Jelesnianski paid careful attention to the relative importance of errors in the model. He worked to reduce the largest errors, and ignored the smaller ones. For example, the distribution of winds in a hurricane is not well known, so it makes little sense to use a spatially varying drag coefficient for the wind. Thus, Jelesnianski used a constant drag coefficient in the air, and a constant eddy stress coefficient in the water.
SLOSH calculates water level from depth-integrated, quasi-linear, shallow-water equations. Thus it ignores stratification. It also ignores river inflow, rain, and tides. The latter may seem strange, but the model is designed for forecasting. The time of landfall cannot be forecast accurately, and hence the height of the tides is mostly unknown. Tides can be added to the calculated surge, but the nonlinear interaction of tides and surge is ignored. The model is forced by idealized hurricane winds. It needs only atmospheric pressure at the center of the storm, the distance from the center to the area of maximum winds, the forecast storm track and speed along the track.
In preparation for hurricanes coming ashore near populated areas, the model has been adapted for 27 basins from Boston Harbor Massachusetts to Laguna Madre Texas. The model uses a fixed polar mesh. Mesh spacing begins with a fine mesh near the pole, which is located near the coastal city for which the model is adapted. The grid stretches continuously to a coarse mesh at distant boundaries of a large basin. Such a mesh gives high resolution in bays and near the coast where resolution is most needed. Using measured depths at sea and elevations on land, the model allows flooding of land, overtopping of levees and dunes, and sub-grid flow through channels between offshore islands.
Sea level calculated from the model has been compared with heights measured by tide gauges for 13 storms, including Betsy: 1965, Camile: 1969, Donna: 1960, and Carla: 1961. The overall accuracy is \(\pm 20\%\).
The Advanced Circulation Model (ADCIRC) is an experimental model for forecasting storm surges produced by hurricanes coming ashore along the Atlantic and Gulf coasts of the United States (Graber et al, 2006). The model uses a finite-element grid, the Boussinesq approximation, quadratic bottom friction, and vertically integrated continuity and momentum equations for flow on a rotating Earth. It can be run as either a two-dimensional, depth-integrated model, or as a three-dimensional model. Because waves contribute to storm surges, the model includes waves calculated from the WAM third-geneation wave model (see Section 16.5).
The model is forced by:
- High resolution winds and surface pressure obtained by combining weather forecasts from the NOAA National Weather Service and the National Hurricane Center along the official and alternate forecast storm tracks.
- Tides at the open-ocean boundaries of the model.
- Sea-surface height and currents at the open-ocean boundaries of the model.
The model successfully forecast the Hurricane Katrina storm surge, giving values in excess of 6.1 meters near New Orleans.